What is EtherCAT?
EtherCAT (Ethernet Control Automation Technology) is a deterministic industrial Ethernet technology developed by Beckhoff Automation in 2003, whose protocol has been published in the IEC61158 standard. EtherCAT meets the real-time hardware and software requirements typical of automation.
EtherCAT first aim is to have a standard high performance industrial communication protocol based on an Ethernet network.
Why should I choose EtherCAT protocol? What are the advantages of EtherCAT protocol?
Here’s the main advantages of using the EtherCAT protocol:
- High performance
- Deterministic bus (real-time)
- Precise and guaranteed synchronization
- Low jitter for accurate synchronization (<1us)
- Flexible topology
- Simple
- Robust
- Open technology
- Widely tested and popular
- Standard protocol
- Economical (low hardware costs)
- Standard Ethernet cabling (simple and inexpensive)
- Ease to use
- Economic
- Adopted by the main manufacturers of master/slave devices
EtherCAT uses the frame and physical layer of the IEEE 802.3 Ethernet standard and is currently considered the fastest industrial Ethernet solution
Compared to classic fieldbuses, EtherCAT is easily configurable, the node addresses can be configured automatically and no network calibration is required. Moreover, the integrated diagnostics allows to identify errors in a clear and simple way. Furthermore, complex management of MAC or IP addresses is not required
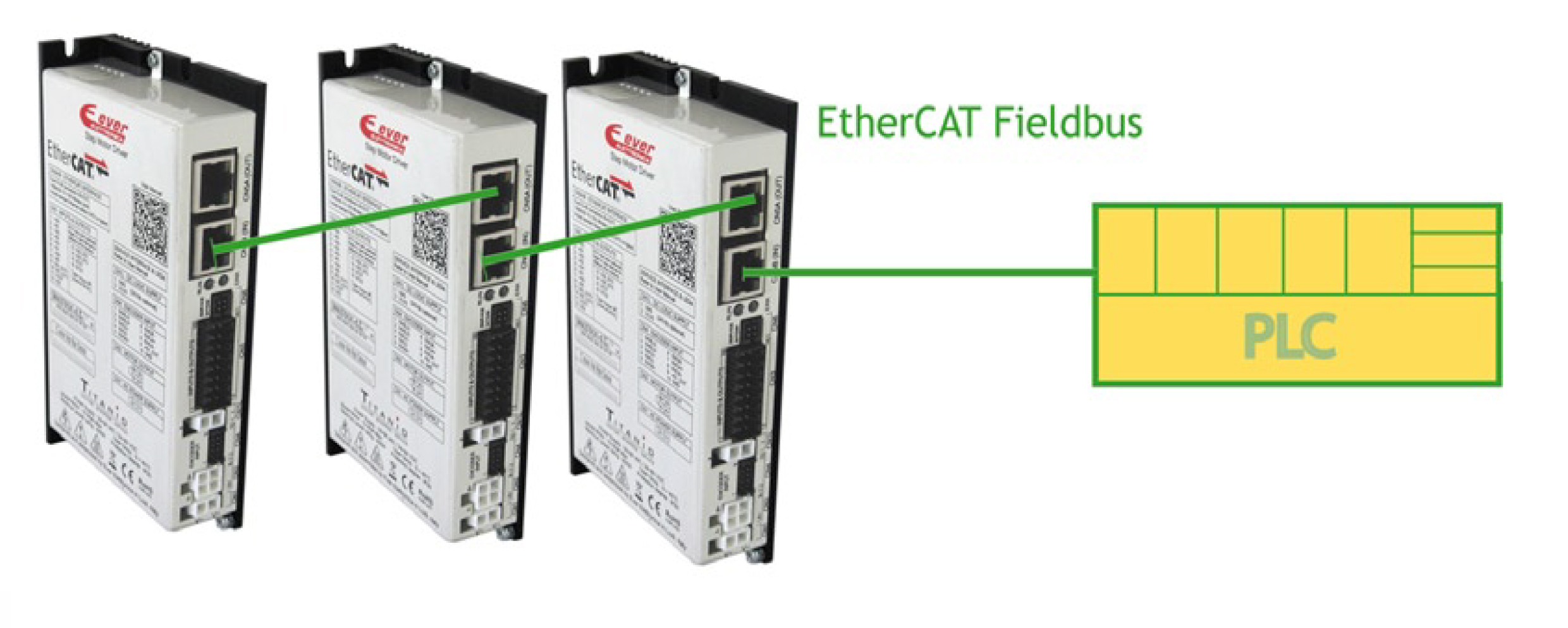
An EtherCAT network can support more than 60000 devices with no particular limitations regarding topology: tree, star, line, cascade or any combination of them. When wiring, the combination of lines with branches or segments in cascade is particularly advantageous. The ports required to obtain the branches are integrated directly into the devices and, therefore, no additional switches are required
Economical industrial Ethernet cables (100BASE-TX standard) can be used for connection within 100 m. For distances greater than 100m optical fibers (100BASE-FX) can be used.
EtherCAT Slave devices integrate 'Hot Connect' functionality: when a port node is disconnected, its communication port is automatically closed to allow the rest of the network to continue without interruption.
A main features of EtherCAT is the 'Distributed Clock' (DC mode) functionality which guarantees precise synchronization, particularly useful for simultaneous actions with exact events synchronization. Typical example: multiple drives that must move their relative motors in coordinated mode, with high tracking accuracy with compared to real-time trajectories generated by a master device. Any inaccuracies and high jitter could also affect the performance response of the motor itself.
The distributed synchronized clocks management, unlike a completely synchronous management, is aimed at obtaining an high tolerance on communication jitter, with deterministic data exchange. Distributed clock calibration is very accurate because it’s completely on hardware level. The time reference of the first DC slave is cyclically distributed to the other devices in the network. So, the clocks of the slave devices are precisely synchronized with the relative clock obtaining a synchronization jitter of less than 1us.
As the communication uses a ring transmission, each node of the network can measure the difference between a frame’s arrival and return passage referring to the main clock and determine the propagation delay of each slave in a simple and accurate way. The distributed clocks are, then, corrected and compensated in order to have a precise network base time.
How does EtherCAT work?
Operation is based on a 'Pass-through telegram' sent by the Master which crosses and reaches all slave nodes in the network.
The telegram is read and/or written 'on the fly' during the passage from each EtherCAT slave device. Each slave reads its own output data from the telegram and writes the produced ones.
The frame’s delay is equal only to the physical crossing time of the single slave (<60ns).
Each EtherCAT slave, then, receives the Ethernet meassage sent by the master and automatically retransmits it to the following device. The last device in the network sends the changed information back to the master.
The use percentage of the telegrams is very high and, thanks to the full-duplex communication, data flow can be higher than 100MHz.
The master uses a standard Media Access Controller (MAC), without a processor dedicated to communication, while the slave devices integrate an EtherCAT slave Controller (ESC) to process frames 'on-the-fly' independently from the slave devices implementation.
The protocol
EtherCAT protocol uses standard Ethernet frames, identified by an EtherType 0x88A4.
| Ethernet header | ECAT | EtherCAT telegram | Ethernet |
| DA | SA | Type | Frame HDR | Datagram 1 | Datagram 2 | ... | Datagram n | Pad. | FCS |
| (6) | (6) | (2/4) | (2) | (10+n+2) | (10+m+2) | | (10+k+2) | (0...32) | (4) |
| Ethertype 0x88A4 | |
During the initialization phase, the master maps and configures the cyclic process data in the slaves.
Each slave can exchange a number of variable data, from 1 bit to a few bytes. Each EtherCAT frame has multiple Datagrams, among which the Datagram header specifies the type of access required by the Master (read, write, read + write, access to a specific slave, access to multiple slaves).
During the initialization phase, the master maps and configures the cyclic process data in the slaves. Each slave can exchange a number of variable data, from 1 bit to a few bytes. Each EtherCAT frame has multiple Datagrams, among which the Datagram header specifies the type of access required by the Master (read, write, read + write, access to a specific slave, access to multiple slaves).
Several profiles and protocols are supported on EtherCAT network. However, an EtherCAT slave does not necessarily have to support all communication profiles: it can choose which one to adopt in relation to its specific needs
(CoE) CAN application protocol over EtharCAT
The communication mechanisms are those of the CANopen standard EN50325-4: Object dictionary, PDO and SDO mapping.
With EtherCAT it is possible to go beyond some limitations of the CANbus implementation, such as the maximum length of 8 bytes for PDOs. Standard device profiles are also supported, such as the one for CiA DS402 drives and motors (IEC 61800-7- 201).
(SoE) Servo drive profile based on IEC 61800-7-204
SERCOS profile is a deterministic communication interface, particularly used in motion control matters.
(EoE) Ethernet over EtherCAT
By using this protocol, any Ethernet data traffic can be transported within the EtherCAT datagram.
(FoE) File access over EtherCAT :
It is a protocol that allows you to access the files in the device and the firmware can be updated via the network.
CANopen DSP402 (IEC 61800-7-201)
What is CANopen DSP402?
The DSP402 is the reference profile for drives and motion controllers based on the standard CANopen protocol (introduced and managed, since 1995,by the CiA group, CAN in Automation).
At the beginning it was used only on CANbus fieldbuses; then the CANopen protocol has also been widely used in other faster and high performance fieldbuses such as EtherCAT.
Today CANopen and DSP402 are part of the IEC 61800-7 standard.
Advantages of CANopen DSP402 (IEC 61800-7-201)
A profile defines a device as 'standard' and it must respect basic rules and functionality. Mandatory features are required to ensure that the operation is possible.
The advantages of the profile approach are:
- system integration
- device standardization
The profile obliges the device manufacturer to meet the required standard requirements: this means greatly reduced effort in the system integration into an application.
EtherCAT and DS402 drives by Ever Motion Solutions
Ever Motion Solutions was one of the first Italian companies to implement and validate the CANopen protocol and the DSP402 on its drives for stepper motors and brushless motors, starting from the early 1990s. In 2012, the EtherCAT fieldbus was introduced, obtaining conformity certification through the 'Beckhoff ET9400 Conformance Test'.
Ever Motion Solutions EtherCAT drives implement the (CoE) CAN application protocol over EtharCAT.
Nowadays, Ever Motion Solutions drives for stepper motors and brushless motors have been used and approved on different types of applications with the main manufacturers of Ethercat and CANbus PLC masters on the market (Omron, Beckhoff, etc).
EtherCAT and DSP402 are available on all types of Ever Motion Solutions drives for stepper motors and brushless motors (brushless DC motors and brushless AC motors).The potential of EtherCAT and DSP402, associated with the vectorial control of the motor current and the management of the torque control of the Ever Motion Solutions drives for stepper motors and brushless motors (brushless DC motors and brushless AC motors), guarantee a highly performing and reliable product.
Ever Motion Solutions drives for stepper motors and brushless motors (brushless DC motors and brushless AC motors) ensure accurate and precise tracking of the motion trajectories generated and required by the EtherCAT master with CSP, CSV, CST interpolated modes, even with high tracking dynamics. Moreover, smooth movements, damping of vibrations and motors resonances, a drastic reduction of noise and motor’s overheating are assured.
Main features and functions of Ever Motion Solutions EtherCAT drives for stepper motors and brushless motors:
- Ethercat drives support all the main motion profiles: Profile Position Mode, Velocity mode, Profile Velocity mode, Homing mode, Interpolated Position mode, Cyclic Synchronous Position mode (CSP), Cyclic Synchronous Velocity mode (CSV), Cyclic Synchronous Torque (cst), Profile Torque mode (tq).
- Synchronization mode: Free Run, (SM) synchronous with SM Event, (DC) Distribuites Clocks
- Minimum cycle time: 500us
- Touch Probe' and 'Factor Group' functionalities
- Diagnostic services
- EVER STUDIO tool for PC to support configuration and debugging
- Dynamic mapping of PDOs
Discover more about our EtherCAT drives for stepper motors and brushless motors